UAM Autonomy: What It’s Going to Take
April 25, 2021 |
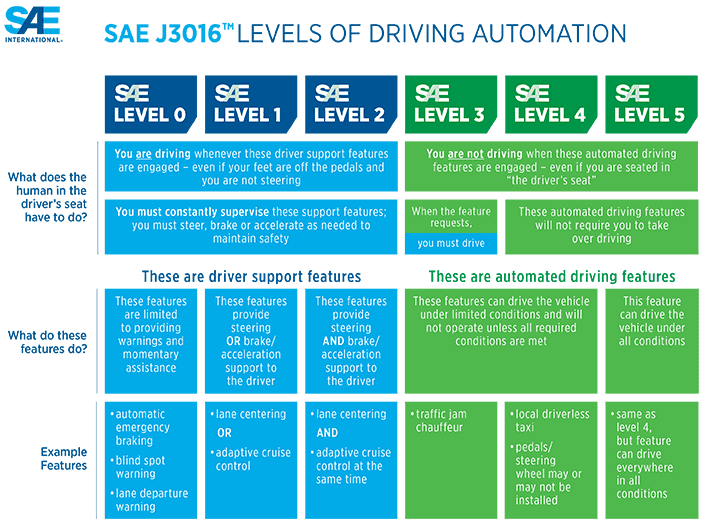
Photo courtesy SAE
Share via:
Follow Us


Formerly AeroCar Journal